CDEF(constrained directional enhancement)约束方向增强滤波器是 AV1 里的几种滤波器之一, SPEC 中定义的该部分在 7.15 CDEF process 中。AOM 代码中在 cdef.c 相关的文件中。除此外,还可以参考 The AV1 CONSTRAINED DIRECTIONAL ENHANCEMENT FILTER论文,本文就是基于上面三个部分分析的结果。
环路滤波器基于非线性低通滤波器,专为矢量化效率设计的。该滤波器考虑边缘方向和滤波模式,它通过确定每个 block 块的方向,然后自适应的用沿方向的滤波强度进行滤波。增强滤波目的是提高 AOM 的质量,尤其是低复杂性的配置中。
CDEF 介绍
CDEF 的主要目的是过滤掉编码杂音,同时保留图像的详细内容。AV1 中采用的方法是非线性空间滤波器,该滤波器的设计非常适用于矢量化,即可以使用 SIMD 操作,而其他非线性滤波器(如中值滤波器和双边滤波器)并非如此。
CDEF 滤波器的设计基于以下观察:编码图像中杂音的数量通常与量化步长大致成比例,图像详细内容的数量是输入图像的一个属性,保留在量化过的图像中的最小的实际信息量也与量化成一定的比例。对于给定的步长,杂音的幅度要比细节的幅度小很多。
CDEF 首先判断每个块的方向,之后沿着判断的方向自适应的滤波,并沿着判断的方向小幅度旋转 45 度,滤波强度明确表示,对模糊的高度控制。
CDEF 是基于之前提到的两个环路滤波器,结合的滤波器用在了 AV1 Codec 中。
从 SPEC 中的7.15 节可以看出,CDEF 可以理解为,输入为重建像素的当前帧数组,输出为包含了 Deringed 像素的数组 CDEF 帧。CDEF 的作用就是在侦测到的块方向上执行 DEringing, 码流中 CDEF 参数存放到每个64x64块(luma像素)中。可以将 CDEF 模块大致分为3步:
- CDEF Block 处理
- CDEF Direction 处理
- CDEF Filter 处理
方向查找
方块滤波后,方向查找就作用在重建像素上。因为重建像素对解码器是可获取的,因此滤波方向不需要特定的给出。查找作用在 8x8 块上,当应用到量化过后的图像时,该大小对于充分处理非直接边缘已经足够小,而对可靠地估计出方向又已经足够大了,有一个固定方向作用在8x8区域上,使得矢量化滤波更容易。
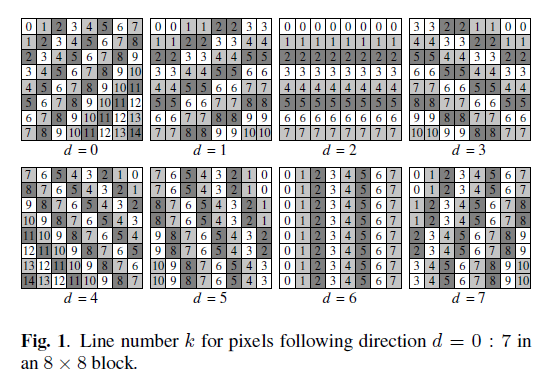
对每个方向d,每行k的平均像素是: $ u_{d,k} = \frac{1}{N_{d,k}} \sum_{p \in P_{d,k}} x_p$ 其中:
- $x_p$ 是像素$p$的值
- $P_{d,k}$是在方向$d$上第$k$行的一组像素值
- $N_{d,k}$是相对$P_{d,k}$对应的基数,如$N_{1,0}=2, N_{1,4}=8$
SSD的计算公式如下:$E_{d}^2 = \sum_{k} \big[\sum_{p \in P_{d,k}} \big( x_{p} - u_{d,k}\big)^2 \big]$
将上面的两个公式整合后,结果如下:$E_{d}^2 = \sum_{p}x_{p}^2 - \sum_{k}\frac{1}{N_{d,k}} \big(\sum_{p \in P_{d,k}} x_p \big)^2$
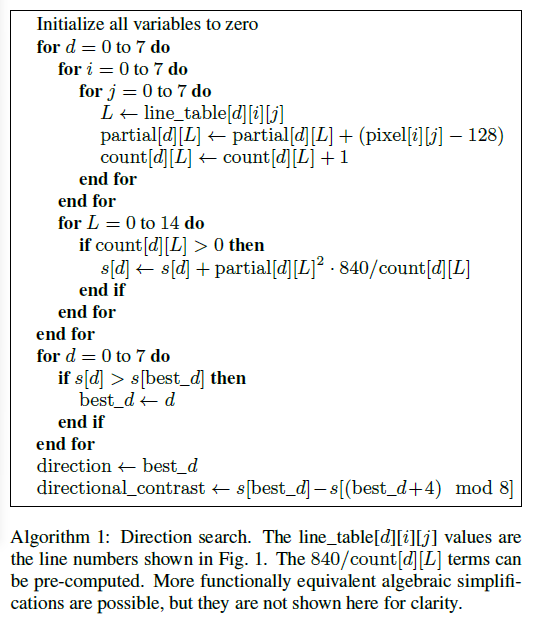
我们可以通过计算上面公式中第二部分的最大值来寻找最佳方向 $d_{opt}$, $d_opt = max_d s_d$, 其中 $s_{d} = \sum_{k}\frac{1}{N_{d,k}} \big(sum_{p \in P_{d,k}} x_p \big)^2$
可以用 840 乘以$S_d$来避免除以$N_{d,k}$,840 是所有$N_{d,k}$的最小公倍数。对于 8bit 数据,数据值为$[-128, 127]$,所有$840S_d$和所有的其他计算都适用于 32位 signed 整数类型。对于更高的bit,如10bit或12bit,在查找方向时,缩放像素到 8bit。
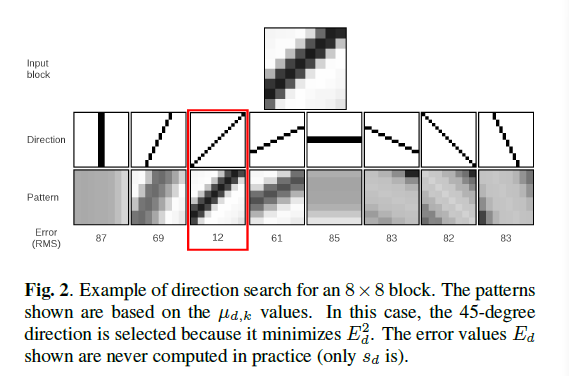
上图展示了一个针对 8x8 块,寻找方向的例子,寻找的算法如下。为了节省解码器的复杂度,我们假定亮度和色度方向是相关的,因此我们只寻找亮度原件的方向,该方向与色度方向相同。
非线性低通滤波器
CDEF 使用非线性低通滤波器,去除编码杂音的同时不会模糊块的边缘。AV1 根据特定方向寻找滤波器抽头位置,同时当滤波器运用到块边界时,要防止过度模糊。使用非线性低通滤波器,在滤波像素偏差过大时,就不再对该像素过度强调。
定向滤波器
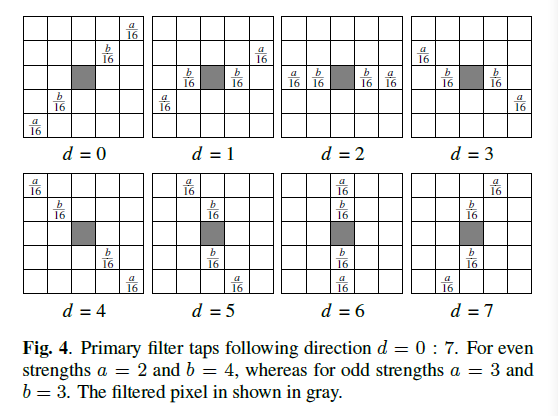
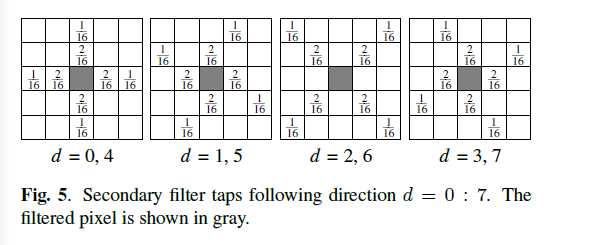
确认方向是为了统一特定方向上滤波器抽头,来降低振铃,同时不会模糊特定的边缘。但是单纯的定向滤波器有时无法高效的降低振铃效应,因此同时需要对像素数据使用滤波器抽头,该抽头并不是直接沿着主要方向。为了降低模糊块的风险,这些额外的抽头会被更保守的处理。因此,CDEF 定义了 primary taps 和 secondary taps。
primary taps 沿着方向 d,它的系数如上面图 4 所示。对 primary taps,对不同的 strength,会有不同的系数,对于1/3/5的strength,与2/4/6的strength,系数是不同的。secondary tpas 会形成一个十字架,是方向 d 旋转 45° 后得到,系数如图 5。
2-D CDEF 滤波器公式如下:
$y(i,j) = x(i,j) + round( \sum_{m,n} w_{d,m,n}^{(p)} f(x(m,n) -x(i, j), S^{(p)}, D) + \sum_{m,n} w_{d,m,n}^{(s)} f(x(m,n) -x(i,j), S^{(s)}, D))$
- $S_{p}$和$S_{s}$是 primary 和 secondary 抽头的 strength。
每个要滤波的 8x8 块,方向、strength 和 damping 参数是固定的。当处理位置(i, j)处的像素时,滤波器允许使用 x(i+m, j+m)处的像素,该像素可能超出 8x8 块的边界。如果处理像素超出了帧范围,像素会被忽略(f(d, S, D) = 0)。为最大化并行,CDEF 总是作用在输入(post-deblocking)像素 x(i,j)上,这样在滤波其他像素时,不会用的之前已经滤波王城的像素。
代码实现分析
此处以 DAV1D 工程里的 CDEF 模块作为例子,主要介绍两部分,cdef_find_dir和cdef_filter_block,并把 10bit 汇编优化完成。完成后,在 pixel2 手机上测试,效率提升大概 30% 左右。
方向查找实现
DAV1D 工程里,对 CDEF 方向查找,完成了 C 代码实现和对 8bit 码流的汇编优化,对10bit优化并没有完成。
1
| |
CDEF 方向滤波
滤波主要由两步完成,